- Systemer. m. Lineære ligninger S. n. ukendt.
Opløsning af systemet med lineære ligninger - Det er en masse tal ( x 1, x 2, ..., x n), Ved at erstatte, som i hver af systemligningerne opnås trofast ligestilling.
hvor en IJ, I \u003d 1, ..., m; j \u003d 1, ..., n - Systemkoefficienter
b I, I \u003d 1, ..., m - Gratis medlemmer
x j, j \u003d 1, ..., n - Ukendt.
Ovenstående system kan optages i en matrixform: A · X \u003d B,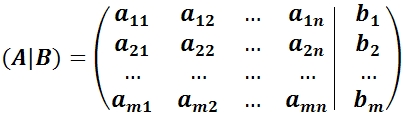

hvor ( EN.|B.) - systemets hovedmatrix;
EN. - en udvidet systemmatrix;
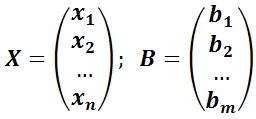
X. - kolonne af ukendt
B. - Kolonne af frie medlemmer.
Hvis matrixen B. Det er ikke en nulmatrix ∅, så kaldes dette system af lineære ligninger heterogene.
Hvis matrixen B. \u003d ∅, dette system af lineære ligninger kaldes homogent. Det homogene system har altid en nul (trivial) løsning: x 1 \u003d x 2 \u003d ..., x n \u003d 0.
Fælles system af lineære ligninger - Dette er en løsning på et system med lineære ligninger.
Dysflower system af lineære ligninger - Dette løser ikke et system med lineære ligninger.
Defineret system af lineære ligninger - Dette er den eneste løsning på systemet med lineære ligninger.
Usikkert system af lineære ligninger - Det har uendelige sæt løsninger system af lineære ligninger. - Systemer n af lineære ligninger med n ukendt
Hvis antallet af ukendte er lig med antallet af ligninger, så er matrixen firkantet. Det afgørende for matrixen kaldes hoveddeterminant for systemet med lineære ligninger og er angivet med symbolet δ.
CRAMER METODE At løse systemer n. Lineære ligninger S. n. ukendt.
CRAMER REGEL.
Hvis hoveddeterminant for systemet med lineære ligninger ikke er lig med nul, bliver systemet koordineret og bestemt, og den eneste løsning beregnes i henhold til crawlerformlerne:
hvor Δ I er determinanterne afledt af hoveddeterminant for Δ-systemet ved udskiftning jEG.-til kolonne på en kolonne af frie medlemmer. . - Systemer m af lineære ligninger med n ukendt
Caperera Capera Theorem.
For at dette system af lineære ligninger skal være fælles, er det nødvendigt og nok til rangen af \u200b\u200bsystemets matrix at være lig med rangen af \u200b\u200ben udvidet systemmatrix, ring (α) \u003d ring (α | b).
Hvis en ring (α) ≠ ring (α | b)Systemet kender ikke løsninger.
Esley. ring (α) \u003d ring (α | b)Så er der to tilfælde mulige:
1) ring (α) \u003d n (antallet af ukendte) - opløsningen er unik og kan opnås ved Cramer-formlerne;
2) ring (α)< n - Løsninger er uendeligt meget. - Gauss metode. At løse systemer af lineære ligninger
Lav en udvidet matrix ( EN.|B.) Dette system er fra koefficienter på ukendte og højre dele.
Gauss-metoden eller udelukkelsesmetoden af \u200b\u200bukendt er at bringe den udvidede matrix ( EN.|B.) Ved hjælp af elementære transformationer over dens linjer til diagonal form (til den øvre trekantede form). Tilbagevendende til systemet med ligninger bestemmer alle ukendte.
De elementære transformationer over linjerne indbefatter følgende:
1) Skift i steder af to linjer;
2) Multiplikation af strengen med et andet antal end 0;
3) Tilføj til strengen af \u200b\u200ben anden linje multipliceret med et vilkårlig nummer;
4) kaste nullinjen.
Den udvidede matrix givet til diagonal form svarer til et lineært system svarende til dette, hvis opløsning ikke forårsager vanskeligheder. . - System af homogene lineære ligninger.
Det homogene system har formularen:
Det svarer til matrixekvationen A · X \u003d 0.
1) Et homogent system er altid medvist, fordi r (a) \u003d r (a | b)Der er altid en nul løsning (0, 0, ..., 0).
2) For at et homogent system skal have en ikke-nul opløsning, er det nødvendigt og nok til r \u003d r (a)< n det svarer til δ \u003d 0.
3) IF. r.< n , så bevidst Δ \u003d 0, så er der gratis ukendt c 1, C2, ..., C N-RSystemet har ikke-relevante løsninger, og de er uendeligt meget.
4) Generel løsning X. til r.< n Det kan optages i matrixform som følger:
X \u003d C 1 · X 1 + C2 · X2 + ... + C N-R · X N-R,
Hvor løsninger X 1, x 2, ..., x n-r Danner det grundlæggende system af løsninger.
5) Det grundlæggende system af opløsninger kan opnås fra den generelle opløsning af et homogent system: ,
,
Hvis du konsekvent troede på parameterværdier svarende til (1, 0, ..., 0), (0, 1, ..., 0), ..., (0, 0, ..., 1) .
Nedbrydning af en generel løsning på det grundlæggende system af løsninger - Dette er en generel løsning i form af en lineær kombination af opløsninger, der tilhører det grundlæggende system.
Teorem. For at systemet med lineære homogene ligninger har en ikke-nul opløsning, er det nødvendigt og nok til δ ≠ 0.
Så hvis determinant Δ ≠ 0, så har systemet en enkelt løsning.
Hvis δ ≠ 0, har systemet med lineære homogene ligninger uendelige flere opløsninger.
Teorem. For at et homogent system skal have en ikke-nul opløsning, er det nødvendigt og nok til r (a)< n .
Beviser:
1) r. kan ikke være mere n. (Rangen af \u200b\u200bmatrixen overstiger ikke antallet af kolonner eller strenge);
2) r.< n fordi hvis en r \u003d n., så er den vigtigste determinant af systemet δ ≠ 0, og ifølge crawlerformlerne er der en enkelt trivial opløsning. x 1 \u003d x 2 \u003d ... \u003d x n \u003d 0Hvad er i modsætning til tilstanden. Det betyder r (a)< n .
Corollary.. For at et homogent system n. Lineære ligninger S. n. Ukendte havde en ikke-nul løsning, det er nødvendigt og nok til δ \u003d 0.
Undersøg et system med lineære angebraiske ligninger (slava) til enheder betyder finde ud af, dette system har en løsning, eller de er ikke. Nå, hvis der er løsninger, så angiv så mange af dem.
Vi skal bruge information fra emnet "Systemet med lineære algebraiske ligninger. Grundlæggende vilkår. Matrix form for optagelse." Især har vi brug for sådanne begreber som systemmatrixen og en udvidet systemmatrix, da det netop er på dem for at beskrive sætningen af \u200b\u200bKappeli-sætningen. Som sædvanlig vil systemmatrixen blive betegnet med bogstavet $ A $, og den udvidede systemmatrix er bogstavet $ \\ Widetilde (A) $.
Caperera Capera Theorem
Systemet med lineære algebraiske ligninger koordineres derefter, og kun hvis rangen af \u200b\u200bsystemmatrixen er lig med rangen af \u200b\u200ben udvidet systemmatrix, dvs. $ \\ Rang a \u003d \\ rang \\ widetilde (A) $.
Lad mig minde om, at systemet hedder Collaborative, hvis det har mindst en løsning. Capera-Capelli-sætningen siger, at hvis $ \\ rang a \u003d \\ rang \\ widetilde (A) $ er der; Hvis $ \\ rang a \\ neq \\ rang \\ widetilde (A) $, så har denne hældning ingen løsninger (ufuldstændige). Svaret på spørgsmålet om antallet af disse beslutninger giver en konsekvens af KronKener-Capelli teoret. I formuleringen af \u200b\u200bkonsekvensen anvendes bogstavet $ n $, hvilket svarer til antallet af variabler af den givne hældning.
Konsekvens af Kepekener-Capelie Teorem
- Hvis $ \\ rang a \\ neq \\ rang \\ widetilde (a) $, så er slava ufuldstændig (ikke løsninger).
- Hvis $ \\ rang a \u003d \\ rang \\ widetilde (A)< n$, то СЛАУ является неопределённой (имеет бесконечное количество решений).
- Hvis $ \\ rang a \u003d \\ rang \\ widetilde (a) \u003d n $, så er hældningen defineret (den har præcis en løsning).
Bemærk, at det formulerede sætning og konsekvensen af \u200b\u200bdet ikke angiver, hvordan man finder en løsning på slavien. Med deres hjælp kan du kun finde ud af, om disse løsninger eksisterer eller ej, og hvis der er så hvor meget.
Eksempel №1.
Udforsk $ \\ LEFT \\ (\\ BEGIN (ALIGNED) & -3X_1 + 9X_2-7X_3 \u003d 17; \\\\ & -X_1 + 2x_2-4x_3 \u003d 9; \\\\ & 4x_1-2x_2 + 19x_3 \u003d -42. \\ End (justeret ) \\ Right. $ For at forene. Hvis slavien deles, skal du angive antallet af løsninger.
For at finde ud af tilstedeværelsen af \u200b\u200bløsninger af den givne slava, bruger vi Caperera Caperera-sætningen. Vi skal bruge en matrix på $ A $ system og en udvidet matrix af $ \\ widetilde systemet (A) $ skrive dem:
$$ A \u003d \\ VENSTRE (\\ BEGIN (ARRAY) (CCC) -3 & 9 & -7 \\\\ -1 & 2 & -4 \\\\ 4 & 19 \\ End (array) \\ Right); \\; \\ Widetilde (a) \u003d \\ venstre (\\ begynder (array) (ccc | c) -3 & 9 & -7 & 17 \\\\ -1 & 2 & 9 \\\\ 4 & 19 & 19 & \\ End (array) \\ højre). $$.
Det er nødvendigt at finde $ \\ rang en $ og $ \\ rang \\ widetilde (A) $. Til dette er der mange måder, hvoraf nogle er opført i afsnittet "Rank Matrix". Normalt bruges to metoder til at studere sådanne systemer: "Beregning af matrixens karakter pr. Definition" eller "beregning af matrixens karakter ved fremgangsmåden til elementære transformationer."
Metode nummer 1. Beregning af rækker pr. Definition.
Ifølge definitionen er rangen den højeste rækkefølge af minoritetsmatrix, blandt hvilke der er mindst en anden end nul. Studiet starter typisk med mindreårige i den første rækkefølge, men her er det mere bekvemt at starte straks til beregningen af \u200b\u200bmineren af \u200b\u200bden tredje rækkefølge af matrixen $ A $. Elementerne i den tredje ordre mindre er ved krydset mellem tre linjer og tre kolonner af den pågældende matrix. Siden matrixen $ a $ indeholder kun 3 linjer og 3 kolonner, mindre af den tredje rækkefølge af matrixen $ a $ er identifikatoren af \u200b\u200bmatrixen $ a $, dvs. $ \\ DELTA A $. For at beregne determinanten anvender vi formlen nr. 2 fra emnet "formler til at beregne determinanterne i anden og tredje ordrer":
$$ \\ DELTA A \u003d \\ VENSTRE | \\ Begynd (Array) (CCC) -3 & 9 & -7 \\\\ -1 & 2 & -4 \\\\ 4 & -2 & 19 \\ End (Array) \\ Right | \u003d -21. $$.
Så der er en mindre af den tredje rækkefølge af matrixen $ A $, som ikke er lig med nul. Mindre af den fjerde rækkefølge er umuligt at kompilere, da det kræver 4 linjer og 4 kolonner og i en $ en matrix $ 3 linjer og 3 kolonner. Så den højeste rækkefølge af minoritetsmatrix $ a $, blandt hvilke der er mindst en ikke-nul, er 3. Derfor, $ \\ rang a \u003d $ 3.
Vi skal også finde $ \\ Rang \\ Widetilde (A) $. Lad os se på matrixstrukturen på $ \\ Widetilde (A) $. Op til linjen i $ \\ Widetilde Matrix (A) $ Der er elementer af $ A $ matrix, og vi fandt ud af, at $ \\ Delta a \\ neq 0 $. Derfor er $ \\ Widetilde Matrix (A) $ en tredje orden mindre, der ikke er lig med nul. Minorerne for den fjerde rækkefølge af matrix $ \\ Widetilde (A) $ Vi kan ikke komponere, så vi konkluderer: $ \\ Rang \\ Widetilde (A) \u003d $ 3.
Siden $ \\ rang a \u003d \\ rang \\ widetilde (A) $, så ifølge KLEKEKER-CAPELI-sætningen, er systemet co-anvendt, dvs. Den har en løsning (mindst en). For at angive antallet af løsninger tager vi hensyn til, at vores hældning indeholder 3 ukendte: $ x_1 $, $ x_2 $ og $ x_3 $. Da antallet af ukendte $ n \u003d $ 3, gør vi konklusionen: $ \\ Rang A \u003d \\ Rang \\ Widetilde (A) \u003d N $, derfor ifølge konsekvensen af \u200b\u200bCapera-Capereli teorer, er systemet defineret, IE. Det har en enkelt beslutning.
Opgaven løses. Hvilke ulemper og fordele er denne metode? Til at begynde med skal du tale om profferne. For det første var vi nødt til at finde kun en determinant. Derefter konkluderede vi straks om antallet af beslutninger. Normalt gives standard typiske beregninger systemer af ligninger, der indeholder tre ukendte og har en enkelt opløsning. For sådanne systemer er denne metode meget praktisk, for vi ved på forhånd, at der er en løsning (ellers ville eksemplet ikke være i standardberegningen). De der. Vi skal kun vise tilstedeværelsen af \u200b\u200bløsninger på den hurtigste måde. For det andet er den beregnede værdi af systemmatrixen af \u200b\u200bsystemet (dvs. $ \\ DELTA A $) nyttig efter: Når du bestemmer det angivne system af styresystemet eller ved hjælp af en omvendt matrix.
Metoden til beregning af rangen pr. Definition er imidlertid uønsket at anvende, hvis matrixen på $ A $ -systemet er rektangulært. I dette tilfælde er det bedre at anvende den anden metode, som vil blive diskuteret nedenfor. Hertil kommer, at hvis $ \\ DELTA A \u003d $ 0, vil vi ikke være i stand til at sige noget om antallet af løsninger givet til den inhomogene hældning. Måske har det uendelige antal løsninger en skråning, og måske ikke en. Hvis $ \\ Delta A \u003d 0 $ kræver en yderligere undersøgelse, der ofte er voluminøs.
Opsummering af den nævnte, bemærker jeg, at den første metode er god for de slaviske, hvis matrix firkantede system. Samtidig indeholder slavet selv tre eller fire ukendte og taget fra standard typiske beregninger eller testarbejde.
Metode nummer 2. Beregning af rang ved elementære transformationer.
Denne metode beskrives detaljeret i det passende emne. Vi beregner raggen i $ \\ Widetilde Matrix (A) $. Hvorfor præcis Matrix $ \\ Widetilde (A) $, ikke $ A $? Faktum er, at $ a $ matrix er en del af $ \\ widetilde matrix (a) $, så beregning af $ \\ widetilde matrix rang (a) $ vi vil samtidig finde både $ a $ matrix rang.
\\ begynder (justeret) & \\ widetilde (a) \u003d \\ venstre (\\ starter (array) (ccc | c) -3 & 9 & -7 & 17 \\\\ -1 & 2 & -4 & 9 \\\\ 4 & - 2 & 19 & -42 \\ End (Array) \\ Højre) \\ Rightarrow \\ Venstre | \\ Tekst (vi ændrer den første og anden linje) \\ Right | \\ Rightarrow \\\\ & \\ Rightarrow \\ Venstre (\\ Begynder (Array) (CCC | C) -1 & 2 & -4 & 9 \\\\ - 3 & 9 & 17 & 17 \\\\ 4 & 19 & - 42 \\ End (array) \\ Højre) \\ Begynd (array) (L) \\ Phantom (0) \\\\ II-3 \\ CDOT I \\\\ III + 4 \\ CDOT I \\ END (Array) \\ Rightarrow \\ Venstre (\\ Begynd (Array) (CCC | C) -1 & 2 & -4 & 9 \\\\ 0 & 3 & 3 & -10 \\ ED (array) \\ Højre) \\ Begynd (array) (L) \\ Phantom (0) \\\\ \\ Phantom (0) \\\\ III-2 \\ CDOT II \\ END (array) \\ Rightarrow \\\\ & \\ Rightarrow \\ Venstre (\\ Begynd (Array) (CCC | C) -1 & 2 & -4 & 9 \\\\ 0 & 3 & 5 & -10 \\ End (array) \\ højre) \\ End (justeret)
Vi ledede $ \\ Widetilde (A) $ til trapezoid form. På den vigtigste Dagonal af den resulterende matrix $ \\ Venstre (\\ Begynder (Array) (CCC | C) -1 & 2 & -4 & 9 \\\\ 0 & 3 & 5 & -10 \\ End (Array) \\ Højre) $ Der er tre ikke-nul-elementer: -1, 3 og -7. Konklusion: Rangen af \u200b\u200bmatrix $ \\ widetilde (A) $ er 3, dvs. $ \\ Rang \\ widetilde (a) \u003d $ 3. Gør konverteringer med en elementer i matrix $ \\ widetilde (A) $ Vi konverteres samtidigt og elementerne i matrixen $ A $, der ligger op til linjen. $ A $ matrix gives også til en trapezoid form: $ \\ venstre (\\ starter (array) (CCC) -1 & 2 & -4 \\\\ 0 & 3 & 5 \\\\ 0 & 0 & -7 \\ End (Array) \\ højre) $. Konklusion: Rangen af \u200b\u200bmatrixen $ A $ er også 3, dvs. $ \\ Rang a \u003d $ 3.
Siden $ \\ rang a \u003d \\ rang \\ widetilde (A) $, så ifølge KLEKEKER-CAPELI-sætningen, er systemet co-anvendt, dvs. har en løsning. For at angive antallet af løsninger tager vi hensyn til, at vores hældning indeholder 3 ukendte: $ x_1 $, $ x_2 $ og $ x_3 $. Da antallet af ukendte $ n \u003d $ 3, gør vi output: $ \\ rang a \u003d \\ rng \\ widetilde (a) \u003d n $, derfor ifølge konsekvensen af \u200b\u200bcappelli-sætningen defineres systemet, dvs. Det har en enkelt beslutning.
Hvad er fordelene ved den anden vej? Den største fordel er dens alsidighed. Det betyder ikke noget for os, om matricen er firkantet eller ej. Derudover gennemførte vi faktisk transformationerne af den direkte bevægelse af Gauss-metoden. Det forbliver kun et par handlinger, og vi kunne få en løsning på denne slava. Ærligt, den anden måde jeg kan lide jo mere først, men valget er et spørgsmål om smag.
Svar: Den angivne slava deles og defineres.
Eksempel nr. 2.
Udforsk $ \\ LEFT \\ (\\ BEGIN (ALIGNED) \\ (\\ BEGIN (ALIGNED) & X_1-X_2 + 2X_3 \u003d -1; \\\\ & -X_1 + 2x_2-3x_3 \u003d 3; \\\\ & 2x_1-x_2 + 3x_3 \u003d 2; \\\\ & 3x_1- 2x_2 + 5x_3 \u003d 1; \\\\ & 2x_1-3x_2 + 5x_3 \u003d -4. \\ End (justeret) \\ Højre. $ For enheder.
At finde rækken af \u200b\u200bsystemmatrixen og en udvidet systemmatrix vil være metoden til elementære transformationer. Udvidet systemmatrix: $ \\ Widetilde (A) \u003d \\ Venstre (\\ Begynd (Array) (CCC | C) 1 & -1 & 2 & -1 \\\\ -1 & 2 & -3 & 3 \\\\ 2 & -1 & 3 & 2 \\\\ 3 & -3 & 5 & 1 \\\\ 2 & -3 & 5 & -4 \\ End (Array) \\ Højre) $. Find de nødvendige rækker, konvertering af en udvidet systemmatrix:

En udvidet systemmatrix er vist til en trindel form. Hvis matrixen gives til en trappet form, er dens rang lig med antallet af ikke-nul-rækker. Derfor er $ \\ rang a \u003d $ 3. Matrixen $ A $ (op til linje) vises til trapezformet form og dens rang er 2, $ \\ Rang A \u003d $ 2.

Siden $ \\ rang a \\ neq \\ rang \\ widetilde (A) $, derefter ifølge Konecker-kapel sætning, er systemet ufuldstændigt (dvs. ingen løsninger).
Svar: Systemet er uforståeligt.
Eksempel nr. 3.
Udforsk $ \\ LEFT \\ (\\ BEGIN (ALIGNED) & 2X_1 + 7X_3-5X_4 + 11X_5 \u003d 42; \\\\ & x_1-2x_2 + 3x_3 + 2x_5 \u003d 17; \\\\ & -3x_1 + 9x_2-11x_3-7x_5 \u003d -64 ; \\\\ & -5x_1 + 17x_2-16x_3-5x_4-4x_5 \u003d -90; \\\\ & 7x_1-17x_2 + 23x_3 + 15x_5 \u003d 132. \\ End (justeret) \\ Højre. $ For enheder.
Udvidet systemmatrix har formularen: $ \\ Widetilde (A) \u003d \\ Venstre (\\ Begynder (Array) (CCCCC | C) 2 & 0 & 7 & 0 & 3 & 42 \\\\ 1 & 3 & 0 & 0 & 0 & 0 & 0 & 0 & 0 & 0 & 0 & 2 & 17 \\\\ -3 & 9 & -11 & 0 & 17 & -64 & -17 & 23 & 15 & 15 & 132 \\ End (Array) \\ Højre) $. Vi ændrer den første og anden linje i denne matrix til det første element i den første linje, $ \\ Venstre (\\ Begynd (Array) (CCCCC | C) 1 & -2 & 3 & 0 & 2 & 17 \\\\ 2 & 0 & 7 & -5 & 11 & 42 \\\\ -7 & -64 \\\\ -5 & 17 & -64 & -5 & -5 & -90 \\\\ 9 & -4 & -90 \\\\ 9 & 23 & 0 & 15 & 132 \\ End (Array) \\ Højre) $.

Vi førte en udvidet systemmatrix og systemmatrixen selv til en trapezformet form. Rangen af \u200b\u200ben udvidet systemmatrix er tre, placeringen af \u200b\u200bsystemmatrixen er også lig med tre. Da systemet indeholder $ n \u003d $ 5 ukendt, dvs. $ \\ Rang \\ widetilde (a) \u003d \\ ringede a< n$, то согласно следствия из теоремы Кронекера-Капелли данная система является неопределённой, т.е. имеет бесконечное количество решений.
Svar: Systemet er usikkert.
I den anden del vil vi analysere eksempler, der ofte er inkluderet i typiske beregninger eller testarbejde på højere matematik: Forskning på enheder og løsning af en hældning afhængigt af værdierne af de parametre, der er inkluderet i den.
Som det er klart kramer Theorems.Ved løsning af et system med lineære ligninger kan der være tre tilfælde:
Første tilfælde: Systemet med lineære ligninger har en enkelt løsning
(System co-og defineret)
 Andet tilfælde: Systemet med lineære ligninger har utallige løsninger
Andet tilfælde: Systemet med lineære ligninger har utallige løsninger
(System af fælles og usikker)
** ![]() ,
,
de der. Koefficienterne på ukendte og frie medlemmer er proportional.
 Tredje sag: Systemet med lineære løsninger har ikke
Tredje sag: Systemet med lineære løsninger har ikke
(Systemet er uforståeligt)
Så, system m. Lineære ligninger S. n.variabler kaldet uden stopHvis hun ikke har nogen løsning, og samlingHvis den har mindst en løsning. Det fælles system af ligninger, der kun har en løsning, kaldes defineret, mere end en - usikker.
Eksempler på at løse systemer af lineære ligninger af CRAMER
Lad systemet blive givet
 .
.
Baseret på Cramer Teorem
………….
,
hvor  -
-
sYSTEM DEFINITION. De resterende determinanter vi får, erstatter en kolonne med koefficienterne for de tilsvarende variable (ukendte) frie medlemmer:



Eksempel 2.
 .
.

Derfor er systemet defineret. For at finde hendes løsninger beregner vi determinanterne



Ved crawler formler finder vi:
![]()
Så (1; 0; -1) er den eneste løsning af systemet.
For at kontrollere løsninger af systemer af ligninger 3 x 3 og 4 x 4 kan du bruge online-regnemaskinen, løse cracer-metoden.
Hvis der ikke er nogen variabler i systemet med lineære ligninger i en eller flere ligninger, så i determinanten er de elementer, der svarer til dem, nul! Dette er følgende eksempel.
Eksempel 3. Løs systemet med lineære ligninger ved CRAMER-metoden:
 .
.
Afgørelse. Vi finder systemets determinant:

Se omhyggeligt på systemet med ligninger og systemdeterminanten og gentag svaret på spørgsmålet, i hvilke tilfælde et eller flere elementer af determinanten er nul. Derfor er determinanten ikke lig med nul, derfor er systemet defineret. For at finde sine løsninger beregner vi de determinanter på ukendt



Ved crawler formler finder vi:
Så opløsningen af \u200b\u200bsystemet er (2; -1; 1).
6. Generelt system af lineære algebraiske ligninger. Gauss metode.
Som vi husker, er CRAMER-reglen og matrixmetoden uegnet i tilfælde, hvor systemet har uendeligt mange løsninger eller inkonsekvente. Gauss metode. – det mest kraftfulde og universelle værktøj til at finde en løsning af ethvert system af lineære ligninger, som i hvert tilfældevil føre os til svaret! Algoritmen i selve metoden i alle tre tilfælde virker ligeligt. Hvis der kræves kendskab til determinanter i CRAMER-metoderne og matrixen, er kendskabet til kun aritmetisk handling nødvendig for at bruge Gauss-metoden, hvilket gør den tilknyttet selv for folkeskolen.
For det første systematiserer nogle viden om systemer med lineære ligninger. Systemet med lineære ligninger kan:
1) har den eneste løsning.
2) har uendeligt mange løsninger.
3) ikke at have løsninger (være uden stop).
Gauss Method - Det mest kraftfulde og universelle værktøj til at finde en løsning nogen Systemer af lineære ligninger. Hvordan husker vi cRAMER regel og matrix metode Forståeligt i tilfælde, hvor systemet har uendeligt mange løsninger eller inkonsekvente. Og metoden til konsekvent udelukkelse af ukendt alligevelvil føre os til svaret! I denne lektion betragter vi igen Gauss-metoden til sagenummer 1 (den eneste løsning af systemet), en artikel er tildelt under situationen i afsnit nr. 2-3. Jeg bemærker, at algoritmen i selve metoden i alle tre tilfælde fungerer lige.
Lad os gå tilbage til det enkleste system fra lektionen Sådan løser du et system med lineære ligninger?
og løse det metode gauss.
I første fase skal du optage udvidet systemmatrix:
. Hvilket princip koefficienterne registreres, tror jeg, at alle kan se. Den lodrette funktion inde i matrixen bærer ikke nogen matematisk betydning - det er bare en tegning for bekvemmeligheden af \u200b\u200bdesign.
reference: Jeg anbefaler husk vilkår Lineær algebra. System matrix - Dette er en matrix bestående kun fra koefficienter på ukendt, i dette eksempel, systemmatrixen :. Udvidet systemmatrix - Dette er den samme matrix af systemet plus en kolonne af frie medlemmer, i dette tilfælde :. Enhver af matricerne kan kaldes simpelthen matrix for korthed.
Når den udvidede systemmatrix optages, er det nødvendigt at udføre nogle handlinger, der også kaldes elementære transformationer..
Der er følgende elementære transformationer:
1) Strenge. Matrians. du kan omarrangere steder. For eksempel i matricen under overvejelse kan du smertefrit omarrangere den første og anden linje: 
2) Hvis der er en matrix (eller dukkede op) proportional (som en særlig sag - de samme) linjer, så følger det dELETE Fra matrixen alle disse linjer udover en. Overvej for eksempel matrixen  . I denne matrix er de sidste tre linjer proportional, så det er nok at forlade kun en af \u200b\u200bdem:
. I denne matrix er de sidste tre linjer proportional, så det er nok at forlade kun en af \u200b\u200bdem:  .
.
3) Hvis en nul streng optrådte i matrixen under konverteringen, skal den også dELETE. Jeg vil ikke tegne, det er klart, nullinjen er en streng, hvor nogle nuller..
4) Matrixstrengen kan være multiplicere (opdelt) For et hvilket som helst nummer. ikke-nul.. Overvej for eksempel matrixen. Her er det tilrådeligt at opdele den første streng til -3, og den anden linje er at formere sig med 2:  . Denne handling er meget nyttig, fordi den forenkler yderligere omdannelse af matrixen.
. Denne handling er meget nyttig, fordi den forenkler yderligere omdannelse af matrixen.
5) Denne transformation forårsager de største vanskeligheder, men der er faktisk ikke noget kompliceret. Til matrixstrengen kan tilføj en anden streng multipliceret med nummeretforskellig fra nul. Overvej vores matrix fra et praktisk eksempel :. Først vil jeg skrive en konvertering meget detaljeret. Vi multiplicerer den første linje til -2:  , I. til den anden linje Tilføj den første streng multipliceret med -2:
, I. til den anden linje Tilføj den første streng multipliceret med -2:  . Nu kan den første linje opdeles "tilbage" til -2 :. Som du kan se en streng, der tilføjer Ligge – ikke ændret. Altid Strengen ændrer sig til hvilken tilføjes Üt..
. Nu kan den første linje opdeles "tilbage" til -2 :. Som du kan se en streng, der tilføjer Ligge – ikke ændret. Altid Strengen ændrer sig til hvilken tilføjes Üt..
I praksis er det så detaljeret, selvfølgelig ikke male, men de skriver kort: 
Endnu en gang: Til den anden linje tilføjet den første streng multipliceret med -2. Strengen er normalt oralt eller på et udkast, mens det mentale kursus af beregninger er ca.
"Jeg omskriver matrixen og omskrivning af den første streng:  »
»
"Første første kolonne. I bunden skal jeg få nul. Derfor multierer enheden øverst på -2: og jeg tilføjer den første til den anden linje: 2 + (-2) \u003d 0. Jeg skriver ned resultatet i den anden streng:  »
»
"Nu den anden kolonne. TOP -1 Multiplicer on -2 :. Til den anden linje tilføjer jeg den første: 1 + 2 \u003d 3. Jeg skriver ned resultatet i den anden streng:  »
»
"Og den tredje kolonne. Top -5 Multiplicer on -2 :. Til den anden linje tilføjer jeg den første: -7 + 10 \u003d 3. Jeg skriver ned resultatet i den anden linje: »
Vær venlig at forstå dette eksempel omhyggeligt og sprede i en på hinanden følgende beregning algoritme, hvis du forstår dette, så er Gauss-metoden praktisk taget "i lommen." Men selvfølgelig arbejder vi stadig på denne transformation.
Elementære transformationer ændrer ikke løsningen af \u200b\u200bsystemet af ligninger
! OPMÆRKSOMHED: Overvejet manipulation kan ikke brugeHvis du bliver bedt om at opgave, hvor matricerne gives af "alene." For eksempel på "Classic" handlinger med matrices. Noget at omarrangere inde i matricerne under ingen omstændigheder!
Lad os gå tilbage til vores system. Det er næsten adskilt omkring knoglerne.
Vi skriver en udvidet systemmatrix og ved hjælp af elementære transformationer giver vi det til standard:

(1) Den anden linje tilføjede den første streng multipliceret med -2. Og igen: Hvorfor multiplicerer første linje på -2? For at tage nul nedenfor, og derfor slippe af med en variabel i anden linje.
(2) Vi deler den anden streng med 3.
Formålet med elementære transformationer –
Føre en matrix til et trin ovenfor:  . I udformningen af \u200b\u200bopgaven er det direkte udarbejdet med en simpel blyant "trappe", og gnider også numrene med cirkler, der er placeret på "trin". Udtrykket "trådte udseende" selv er ikke helt teoretisk, i videnskabelig og pædagogisk litteratur, han ofte kaldes trapezoid arter. eller trekantet udsigt.
. I udformningen af \u200b\u200bopgaven er det direkte udarbejdet med en simpel blyant "trappe", og gnider også numrene med cirkler, der er placeret på "trin". Udtrykket "trådte udseende" selv er ikke helt teoretisk, i videnskabelig og pædagogisk litteratur, han ofte kaldes trapezoid arter. eller trekantet udsigt.
Som følge af modtaget elementære transformationer modtaget tilsvarende Det oprindelige system af ligninger:
Nu skal systemet være "fremme" i modsat retning - fra bunden op, kaldes denne proces tilbagevenden af \u200b\u200bGauss-metoden.
I den lavere ligning har vi et færdigt resultat :.
Overvej den første systemligning og erstat den allerede kendte betydning af "Igarek" i den:
Overvej den mest almindelige situation, når Gauss-metoden er nødvendig for at løse systemet med tre lineære ligninger med tre ukendte.
Eksempel 1.
Løs Gauss metode til systemet af ligninger: 
Vi skriver en udvidet systemmatrix: 
Nu tegner jeg straks resultatet, som vi vil komme under løsningen: 
Og jeg gentager vores mål - ved hjælp af elementære transformationer, fører matrixen til den trinvise form. Hvor skal man starte handlinger?
Først ser vi på venstre øverste nummer: 
Næsten altid bør være her enhed. Generelt vil det arrangere og -1 (og nogle gange andre tal), men på en eller anden måde har det traditionelt udviklet sig, at det normalt placeres en. Hvordan man organiserer en enhed? Vi ser på den første kolonne - den færdige enhed, vi har! Transformation Først: Vi ændrer de første og tredje linjer på steder: 
Nu forbliver den første linje uændret indtil afslutningen af \u200b\u200bbeslutningen. Nu fint.
Enhed i øverste venstre hjørne er organiseret. Nu skal du få Zeros på disse steder: 
Zeros får lige ved hjælp af en "hård" transformation. Først udpeger vi med den anden streng (2, -1, 3, 13). Hvad skal der gøres for at få nul i første position? Behøver til den anden linje Tilføj den første linje multipliceret med -2. Mentalt eller på et udkast multiplicer den første streng til -2: (-2, -4, 2, -18). Og konsekvent udføre (igen mentalt eller på udkastet) tilsætning, til den anden linje Tilføj den første streng, der allerede er multipliceret med -2:
Resultatet registreres i anden linje: 
Tilsvarende beskæftiger sig med den tredje linje (3, 2, -5, -1). For at komme i første position nul, har du brug for til den tredje linje skal du tilføje den første streng multipliceret med -3. Mentalt eller på et udkast multiplicer den første streng til -3: (-3, -6, 3, -27). OG til den tredje linje Tilføj den første streng multipliceret med -3:
Resultatet er skrevet til den tredje linje:
I praksis udføres disse handlinger normalt oralt og registreret i et trin: 
Ingen grund til at overveje alt umiddelbart og på samme tid. Proceduren for beregninger og "montering" resultater konsekvent Og normalt sådan: Først omskrive den første streng og lade dig hævet - sekventielt og Forsigtigt:
Jeg har allerede overvejet det mentale kursus af beregningerne selv.
I dette eksempel er det nemt at gøre, vi deler den anden linje til -5 (da alle tal er opdelt i 5 uden en rest). Samtidig opdeler vi den tredje linje på -2, fordi jo mindre nummeret er, jo lettere er det:
På det sidste fase af elementære transformationer skal du få en anden nul her: 
For det til den tredje linje Tilføj en anden streng multipliceret med -2:
Prøv at demontere denne handling selv - mentalt multiplicere den anden streng på -2 og gøre tilføjelse.
Den sidste handling er frisure, vi deler den tredje linje med 3.
Som et resultat af elementære transformationer blev der opnået et ækvivalent kildesystem af lineære ligninger: 
Fedt nok.
Den omvendte bevægelse af Gauss-metoden træder i kraft. Ligningerne er "slappe af" fra bunden op.
I den tredje ligning har vi allerede et færdigt resultat:
Vi ser på den anden ligning :. Værdien "Zet" er allerede kendt, så:
Og endelig den første ligning :. "Igarek" og "Zet" er kendt, det er lille:
Svar: ![]()
Som det allerede er blevet gentaget gentagne gange, er det muligt for ethvert system af ligninger og nødt til at kontrollere den fundne løsning, god, det er nemt og hurtigt.
Eksempel 2.

Dette er et eksempel på en uafhængig løsning, en prøve af et rent design og respons i slutningen af \u200b\u200blektionen.
Det skal bemærkes, at din procedurer. må ikke falde sammen med min beslutning af beslutningen, og dette er funktionen i Gauss-metoden.. Men nu skal svarene være lig med det samme!
Eksempel 3.
Løs systemet med lineære ligninger af Gauss 
Vi skriver den udvidede matrix af systemet og ved hjælp af elementære transformationer giver vi det til trinstypen:
Vi ser på venstre øverste "trin". Der skal vi have en enhed. Problemet er, at der slet ikke er nogen enheder i den første kolonne, så intet at løse rækkernes permutation. I sådanne tilfælde skal man organiseres ved hjælp af en elementær transformation. Dette kan normalt gøres på flere måder. Det gjorde jeg:
(1) Til den første linje Tilføj en anden streng multipliceret med -1. Det vil sige mentalt multipliceret den anden linje på -1 og afsluttede tilføjelsen af \u200b\u200bden første og anden linje, mens vi ikke ændrede anden linje.

Nu til venstre på toppen af \u200b\u200b"minus en", at det er helt egnet. Hvem ønsker at få +1, kan udføre yderligere fjernsyn: Multiplicer den første streng på -1 (skift tegnet fra det).
(2) Den anden linje tilføjede den første streng multipliceret med 5. til den tredje linje tilsat den første streng multipliceret med 3.
(3) Den første streng blev multipliceret med -1, i princippet er det for skønhed. Den tredje linje ændrede også tegnet og omarrangeret det på andenpladsen, så på det andet "trin havde vi den ønskede enhed.
(4) til den tredje linje tilsat en anden streng multipliceret med 2.
(5) Den tredje linje blev opdelt i 3.
En dårlig funktion, der angiver en fejl i beregninger (mindre ofte om at skrive) er den "dårlige" bundlinje. Det vil sige, hvis vi var i bunden, noget som, og dermed, ![]() Med stor sandsynlighed kan det hævdes, at der foretages en fejl under elementære transformationer.
Med stor sandsynlighed kan det hævdes, at der foretages en fejl under elementære transformationer.
Vi opkræver omvendt bevægelse, i udformningen af \u200b\u200beksempler ændrer sig ofte ikke selve systemet, og ligningerne "tager direkte fra den givne matrix". Returnere, jeg minder dig om, arbejder, bottom up. Ja, her viste gaven ud:
Svar: ![]() .
.
Eksempel 4.
Løs systemet med lineære ligninger af Gauss 
Dette er et eksempel på en uafhængig løsning, det er noget mere kompliceret. Intet forfærdeligt, hvis nogen er forvirret. Komplet opløsning og prøve design i slutningen af \u200b\u200blektionen. Din beslutning kan afvige fra min beslutning.
I sidste del skal du overveje nogle funktioner i Gauss-algoritmen.
Den første funktion er, at der til tider ikke er variabler i systemligningerne, for eksempel: 
Sådan optages en udvidet systemmatrix? Om dette øjeblik talte jeg allerede på lektionen CRAMER REGEL. Matrix metode.. I den udvidede matrix af systemet på stedet for de manglende variabler sætter vi Zeros: 
Forresten er dette et ret nemt eksempel, da der i den første kolonne allerede er en nul, og der er færre elementære transformationer.
Den anden funktion består i dette. I alle de undersøgte eksempler placerede vi enten -1 eller +1. Kan der være andre tal der? I nogle tilfælde kan. Overvej systemet:  .
.
Her på venstre øvre "trin" har vi en to. Men vi bemærker, at alle numre i den første kolonne er opdelt i 2 uden en rest - og den anden to gange og seks. Og deuce venstre øverst passer os! I det første trin skal du udføre følgende transformationer: for at tilføje den første streng multipliceret med -1 til den anden linje; Til den tredje linje tilsættes den første streng multipliceret med -3. Således får vi de ønskede nuller i den første kolonne.
Eller et andet betinget eksempel:  . Her er trojka på det andet "trin" tilfreds med os, fordi 12 (det sted, hvor vi skal få nul) er divideret med 3 uden balance. Det er nødvendigt at udføre følgende transformation: Til den tredje linje tilsættes en anden streng multipliceret med -4, som et resultat af hvilket det nul, vi har brug for, vil blive opnået.
. Her er trojka på det andet "trin" tilfreds med os, fordi 12 (det sted, hvor vi skal få nul) er divideret med 3 uden balance. Det er nødvendigt at udføre følgende transformation: Til den tredje linje tilsættes en anden streng multipliceret med -4, som et resultat af hvilket det nul, vi har brug for, vil blive opnået.
Gaussian metode er universel, men der er en egenskab. Sikkert lærer at løse systemerne ved andre metoder (ved hjælp af krateret, matrixmetoden), er det bogstaveligt talt første gang - der er en meget stiv algoritme. Men for at føle sig trygt i Gauss-metoden, skal du "fylde hånden" og bryde mindst 5-10 systemer. Derfor er det muligt at forvirre, fejl i beregninger, og der er ikke noget usædvanligt eller tragisk.
Regnligt efterårs vejret uden for vinduet .... For alle dem, der ønsker et mere komplekst eksempel for en uafhængig løsning:
Eksempel 5.
Løs Gauss-metoden med fire lineære ligninger med fire ukendte. 
En sådan opgave i praksis er ikke så sjælden. Jeg tror selv en tekande, der studerede denne side i detaljer, er algoritmen til at løse et sådant system intuitivt forstået. I princippet er alt det samme - bare mere handling.
Tilfælde, hvor systemet ikke har nogen løsninger (inkonsekvent) eller har uendeligt mange løsninger, der betragtes som i lektionen Invaliteter og systemer med en generel løsning. Der kan du også konsolidere den betragtede algoritme i Gauss-metoden.
Jeg ønsker dig succes!
Løsninger og svar:
Eksempel 2: Afgørelse: Vi skriver den udvidede matrix af systemet og ved hjælp af elementære transformationer giver vi det til et trin ovenfor.

Udførte elementære transformationer:
(1) Den anden linje tilføjede den første streng multipliceret med -2. Til den tredje linje tilføjede den første streng multipliceret med -1. Opmærksomhed! Her kan der være en fristelse fra den tredje linje for at trække den første, jeg er yderst ikke anbefalet at fratrække - risikoen for fejl stiger stærkt. Bare fold!
(2) Den anden linje ændrede tegnet (multipliceret med -1). Andet og tredje linjer ændrede steder. BemærkAt på "trin" er tilfredse med os ikke kun enheden, men også -1, hvilket er endnu mere bekvemt.
(3) til den tredje linje tilsat en anden streng multipliceret med 5.
(4) Den anden linje ændrede tegnet (multipliceret med -1). Den tredje linje blev opdelt i 14.
Vend tilbage:
Svar: ![]() .
.
Eksempel 4: Afgørelse: Vi skriver den udvidede systemmatrix og ved hjælp af elementære transformationer giver vi det til trinstypen:

Konvertering udført:
(1) Den anden linje blev tilsat til den anden. Således er den ønskede enhed organiseret på venstre øvre "trin".
(2) Den anden linje blev tilsat til den første streng multipliceret med 7. Til den tredje linje tilsat den første linje multipliceret med 6.
Med det andet "trin" er værre, "Kandidater" på it-tal 17 og 23, og vi har brug for enten en enkelt eller -1. Transformation (3) og (4) vil være rettet mod at opnå den ønskede enhed
(3) til den tredje linje tilsat den anden, multipliceret med -1.
(4) Den anden linje tilføjede den tredje, multipliceret med -3.
Den ønskede ting på det andet trin opnås
.
(5) til den tredje linje tilsat den anden, multipliceret med 6.
Inden for lektioner gauss metode. og Ufuldstændige systemer / systemer med en generel løsningvi overvejede inhomogene systemer af lineære ligningerhvor gratis Dick.(som normalt er rigtigt) mindst en Fra ligningerne var forskellig fra nul.
Og nu efter en god træning med rank matrixVi vil fortsætte med at male udstyret elementære transformationer. på den homogene system af lineære ligninger.
Ifølge første afsnit kan materialet virke kedeligt og almindeligt, men dette indtryk er vildledende. Ud over at videreuddannelse af tekniske teknikker vil der være mange nye oplysninger, så prøv ikke at forsømme eksemplerne på denne artikel.
Systemer af lineære ligninger
I. Problemerklæring.
II. Ensartede ensartede og inhomogene systemer.
III. System t. Ligninger S. t. ukendt. CRAMER REGEL.
Iv. Matrixmetode Løsningssystemer af ligninger.
V. Gauss metode.
I. Problemerklæring.
System af visning ligninger
kaldte systemet. m. Lineære ligninger S. n. Ukendt  . Koefficienterne for ligningerne af dette system registreres som en matrix
. Koefficienterne for ligningerne af dette system registreres som en matrix

hedder system matrix (1).
Tallene står i de rigtige dele af ligningens form kolonne af frie medlemmer {B.}:
 .
.
Hvis kolonne ( B.}={0 ), så kaldes systemet med ligninger uniform. Ellers når ( B.}≠{0 ) - System heterogene.
Systemet med lineære ligninger (1) kan optages i matrixform
[EN.]{x.}={B.}. (2)
Her  - Kolonne af ukendt.
- Kolonne af ukendt.
Løs systemet med ligninger (1) betyder at finde en kombination n.
numbers.  således at når du erstatter i systemet (1) i stedet for ukendt
således at når du erstatter i systemet (1) i stedet for ukendt  hver systemligning appellerer til identitet. Numbers.
hver systemligning appellerer til identitet. Numbers.  Kaldet løsninger af systemet af ligninger.
Kaldet løsninger af systemet af ligninger.
Systemet med lineære ligninger kan have en løsning
 ,
,
kan have utallige løsninger

eller ikke har løsninger overhovedet
 .
.
Systemer af ligninger, der ikke har løsninger, kaldes ikke-senge. Hvis systemet med ligninger har mindst en løsning, så kaldes den samling. Systemet med ligninger kaldes defineretHvis det har den eneste løsning og usikkerHvis der er utallige løsninger.
II. Ensartede ensartede og inhomogene systemer.
Tilstanden af \u200b\u200bsystemet med systemet med lineære ligninger (1) er formuleret i capera capera theorem: Systemet med lineære ligninger har mindst en løsning i det og kun i tilfældet, når rangen af \u200b\u200bsystemmatrixen er lig med rangen af \u200b\u200ben udvidet matrix:  .
.
En udvidet matrix af systemet kaldes en matrix, der er resultatet af systemmatrixen, der tilskrives den til den højre kolonne af frie medlemmer:
 .
.
Hvis rg. EN.
Ensartede systemer af lineære ligninger i overensstemmelse med Cappeli theoremker er altid i fællesskab. Overvej sagen om et homogent system, hvor antallet af ligninger er lig med antallet af ukendte, det vil sige t \u003d P.. Hvis determinant af matrixen af \u200b\u200bet sådant system ikke er nul, dvs.  Det homogene system har en enkelt løsning, der er trivial (nul). Ensartede systemer har utallige løsninger, hvis der er lineært afhængige blandt systemlignerne, dvs.
Det homogene system har en enkelt løsning, der er trivial (nul). Ensartede systemer har utallige løsninger, hvis der er lineært afhængige blandt systemlignerne, dvs.  .
.
Eksempel. Overvej et homogent system af tre lineære ligninger med tre ukendte:

og vi undersøger spørgsmålet om sine beslutninger. Hvert ligninger kan betragtes som ligning af flyet, der passerer gennem koordinaternes oprindelse ( D.=0 ). Systemet med ligninger har en enkelt løsning, når alle tre fly skærer på et tidspunkt. Samtidig er deres normale vektorer noncomplete, og derfor udføres en betingelse
 .
.
Opløsning af systemet på samme tid x.=0, y.=0, z.=0 .
Hvis mindst to af de tre fly, for eksempel den første og anden, parallel, dvs. Det afgørende for systemmatrixen er nul, og systemet har utallige løsninger. Og løsninger vil være koordinater x., y., z. Alle punkter ligger på en lige

Hvis alle tre fly falder sammen, vil systemet af ligninger blive reduceret til en ligning
 ,
,
og løsningen vil være koordinaterne for alle punkter, der ligger i dette fly.
I undersøgelsen af \u200b\u200binhomogene systemer af lineære ligninger løses spørgsmålet om kompatibilitet ved hjælp af kaperena Caperera-sætningen. Hvis antallet af ligninger i et sådant system er lig med antallet af ukendte, har systemet en enkelt opløsning, hvis dets determinant ikke er nul. Ellers er systemet enten inkonsekvent eller har utallige løsninger.
Eksempel. Vi udforsker det inhomogene system af to ligninger med to ukendte
 .
.
Systemets ligninger kan betragtes som ligninger af to direkte på flyet. Systemet er ufuldstændigt, når det er lige parallelt, dvs.
 ,
,
 . I dette tilfælde er rangen af \u200b\u200bmatrixen af \u200b\u200bsystemet 1:
. I dette tilfælde er rangen af \u200b\u200bmatrixen af \u200b\u200bsystemet 1:
Rg. EN.=1
fordi  ,
,
og rangen af \u200b\u200ben udvidet matrix  svarende til to, da der for det er en anden ordre mindre indeholdende den tredje kolonne, kan vælges som en grundlæggende mindreårig.
svarende til to, da der for det er en anden ordre mindre indeholdende den tredje kolonne, kan vælges som en grundlæggende mindreårig.
I dette tilfælde rg EN.
Hvis direkte falder sammen, dvs. Systemet med ligninger har utallige løsninger: koordinaterne for punkterne på den lige  . I dette tilfælde rg EN.=
Rg. EN. *
=1.
. I dette tilfælde rg EN.=
Rg. EN. *
=1.
Systemet har en enkelt løsning, når straightless ikke er parallelle, dvs.  . Løsningen af \u200b\u200bdette system er koordinaterne for krydspunktet for direkte
. Løsningen af \u200b\u200bdette system er koordinaterne for krydspunktet for direkte 
III. Systemt. Ligninger S.t. ukendt. CRAMER REGEL.
Overvej det enkleste tilfælde, når antallet af systemligninger er lig med antallet af ukendte, dvs. m.= n.. Hvis determinanten af \u200b\u200bsystemmatrixen er forskellig fra nul, kan systemopløsningen findes i henhold til CRAMER-reglerne:
 (3)
(3)
Her  - determinant af systemmatrixen,
- determinant af systemmatrixen,
 - Determinant af matrixen opnået fra [ EN.] Erstatte jEG.Begge kolonne på kolonnen af \u200b\u200bgratis medlemmer:
- Determinant af matrixen opnået fra [ EN.] Erstatte jEG.Begge kolonne på kolonnen af \u200b\u200bgratis medlemmer:
 .
.
Eksempel. Løs systemet med ligninger ved Cramer-metoden.

Afgørelse :
1) Vi finder systemets determinant

2) Vi finder hjælpeterminanter

3) Vi vil finde løsningen af \u200b\u200bsystemet i henhold til CRAMER-reglen:

Resultatet af opløsningen kan kontrolleres ved substitution til systemet af ligninger.

Pålidelige identiteter opnås.
Iv. Matrixmetode Løsningssystemer af ligninger.
Skriv et system med lineære ligninger i matrixform (2)
[EN.]{x.}={B.}
og formere de højre og venstre dele af forholdet (2) til venstre for matrixen [ EN. -1 ], Reverse System Matrix:
[EN. -1 ][EN.]{x.}=[EN. -1 ]{B.}. (2)
Ved definition af returmatrixen, arbejdet [ EN. -1 ][EN.]=[E.], og ifølge egenskaberne af en enkelt matrix [ E.]{x.}={x.). Så fra forholdet (2 ") får vi
{x.}=[EN. -1 ]{B.}. (4)
Forholdet (4) ligger under matrixmetoden til at løse systemet med lineære ligninger: Det er nødvendigt at finde en matrix, en omvendt matrix af systemet og multiplicere til den på venstre vektorkolonne af de højre dele af systemet.
Eksempel. Ved at løse matrixmetoden for systemet af ligninger, der overvejes i det foregående eksempel.

System matrix  Dens determinant det. EN.==183
.
Dens determinant det. EN.==183
.
Kolonne af højrehåndsdele
 .
.
At finde matrixen [ EN. -1 ], find en matrix knyttet til [ EN.]:

eller 
I formlen til beregning af returmatrixen indtaster  , derefter
, derefter

Nu kan du finde løsningssystemet

Så endelig få  .
.
V. Gauss metode.
Med et stort antal ukendte opløsninger af systemet af ligninger af controlleren eller matrixmetoden er det forbundet med beregningen af \u200b\u200bhigh-order-determinanter eller cirkulation af store matricer. Disse procedurer er meget besværlige selv for moderne computere. For at løse systemerne i et stort antal ligninger anvendes Gauss-metoden oftere.
Gauss-metoden består i den konsekvente udelukkelse af ukendt ved elementære transformationer af den udvidede systemmatrix. Elementære transformationer af matrixen indbefatter permutationen af \u200b\u200bstrenge, foldestrenge, multiplicere rækker pr. Andre tal end nul. Som et resultat af transformationerne fjernes matrixen af \u200b\u200bsystemet til top trekantet på hoveddiagonalen, hvoraf der er enheder og under hoveddiagonal-nulerne. Dette er den direkte bevægelse af Gauss-metoden. Det modsatte forløb af metoden er at definere direkte, begyndende med sidstnævnte.
Vi illustrerer Gauss-metoden på eksemplet om at løse systemet af ligninger

I det første skridt søger direkte streger koefficienten  Det transformerede system blev lige 1
, og koefficienter
Det transformerede system blev lige 1
, og koefficienter  og
og  appelleret til nul. Til dette vil den første ligning multiplicere på 1/10
, anden ligning til multiplicere på 10
og læg dig ned med den første, den tredje ligning til at formere sig på -10/2
og læg dig ned med den første. Efter disse transformationer får vi
appelleret til nul. Til dette vil den første ligning multiplicere på 1/10
, anden ligning til multiplicere på 10
og læg dig ned med den første, den tredje ligning til at formere sig på -10/2
og læg dig ned med den første. Efter disse transformationer får vi

Ved det andet trin søger vi efter transformationer koefficienten  blev lige 1
, og koefficient
blev lige 1
, og koefficient  . For at gøre dette er den anden ligning opdelt i 42
og den tredje ligning til at formere sig på -42/27
og foldes med den anden. Vi får systemet med ligninger
. For at gøre dette er den anden ligning opdelt i 42
og den tredje ligning til at formere sig på -42/27
og foldes med den anden. Vi får systemet med ligninger

I det tredje trin bør få koefficienten  . Til dette er den tredje ligning opdelt i (37 - 84/27)
; Modtage
. Til dette er den tredje ligning opdelt i (37 - 84/27)
; Modtage

På dette direkte kursus af Gauss-metoden slutter, fordi Systemmatrixen reduceres til top trekantet:

Returnere, find ukendt

Opløsningen af \u200b\u200bsystemer af lineære algebraiske ligninger (slava) er utvivlsomt det vigtigste emne af linjen af \u200b\u200blineær algebra. Et stort antal opgaver fra alle dele af matematik reduceres til at løse systemer af lineære ligninger. Disse faktorer forklarer årsagen til at oprette denne artikel. Artikelartikelen er valgt og struktureret, så med det kan du
- vælg den optimale metode til at løse dit system af lineære algebraiske ligninger,
- udforsk teorien om den valgte metode,
- løs dit system med lineære ligninger, undersøgt i detaljer demonterede løsninger af karakteristiske eksempler og opgaver.
Kort beskrivelse af artiklens materiale.
For det første vil vi give alle de nødvendige definitioner, koncepter og indføre notation.
Dernæst betragter vi metoder til løsning af systemer af lineære algebraiske ligninger, hvor antallet af ligninger er lig med antallet af ukendte variabler, og som har en enkelt løsning. For det første vil vi fokusere på CRAMER-metoden, for det andet vil vi vise matrixmetoden til at løse sådanne ligningssystemer, for det tredje vil vi analysere Gauss-metoden (metode til konsekvent udelukkelse af ukendte variabler). For at sikre teorien vil det nødvendigvis løse flere sænker på forskellige måder.
Derefter fortsætter vi med at løse systemer af lineære algebraiske ligninger af en fælles form, hvor antallet af ligninger ikke falder sammen med antallet af ukendte variabler, eller systemets hovedmatrix er degenereret. Vi formulerer sættet af KroCecker - Capelli, som giver dig mulighed for at etablere slaves kompatibilitet. Vi vil analysere løsningen af \u200b\u200bsystemer (i tilfælde af deres kompatibilitet) ved hjælp af begrebet grundlæggende mindre af matrixen. Vi vil også overveje Gauss-metoden og beskrive i detaljer løsninger af eksempler.
Vi vil helt sikkert fokusere på strukturen af \u200b\u200bden samlede løsning af homogene og inhomogene systemer af lineære algebraiske ligninger. Vi giver begrebet et grundlæggende løsningssystem og viser, hvordan den generelle løsning er skrevet til slavien ved hjælp af vektorerne i det grundlæggende løsningssystem. For en bedre forståelse vil vi analysere flere eksempler.
Afslutningsvis anser vi for systemet med ligninger, der reduceres til lineære, såvel som forskellige opgaver, når vi løser, hvilken hældning opstår.
Navigeringsside.
Definitioner, koncepter, notation.
Vi vil overveje systemer fra p lineære algebraiske ligninger med n ukendte variabler (P kan være lig med n)
Ukendte variabler - koefficienter (nogle gyldige eller komplekse tal) - Gratis medlemmer (også gyldige eller komplekse tal).
En sådan form for skrev kaldes koordinere.
I matrixform Records Dette system af ligninger har formularen
Hvor  - Systemets hovedmatrix, - en matrixkolonne af ukendte variabler, - en matrixkolonne af frie medlemmer.
- Systemets hovedmatrix, - en matrixkolonne af ukendte variabler, - en matrixkolonne af frie medlemmer.
Hvis du tilføjer matricen og tilføj en matrix-kolonne-kolonne af frie medlemmer, så får vi den såkaldte udvidet matrix Systemer af lineære ligninger. Typisk betegnes den udvidede matrix af bogstavet T, og søjlen af \u200b\u200bfrie medlemmer adskilles af den lodrette linje fra de resterende søjler, det vil sige 
Ved at løse systemet med lineære algebraiske ligninger Ring til et sæt værdier af ukendte variabler, hvilket tilføjer alle ligninger af systemet i identiteter. Matrixekvationen for disse værdier af ukendte variabler adresserer også identitet.
Hvis systemet med ligninger har mindst en løsning, så kaldes den samling.
Hvis systemet med løsninger ikke har, så kaldes det uden stop.
Hvis den eneste løsning har en enkelt beslutning, så kaldes den defineret; Hvis løsninger er mere end en, så - usikker.
Hvis gratis vilkår for alle systemligninger er nul ![]() Så kaldes systemet uniform, Ellers - heterogene.
Så kaldes systemet uniform, Ellers - heterogene.
Løsningen af \u200b\u200belementære systemer af lineære algebraiske ligninger.
Hvis antallet af systemligninger svarer til antallet af ukendte variabler, og determinanten af \u200b\u200bdets hovedmatrix ikke er nul, så vil en sådan hældning blive kaldt elementære. Sådanne systemer af ligninger har en enkelt opløsning, og i tilfælde af et homogent system er alle ukendte variabler nul.
Vi begyndte at studere i gymnasiet sådan en kraniet. Da de blev løst, tog vi en form for ligning, udtrykte en ukendt variabel gennem andre og erstattede det i de resterende ligninger, fulgte følgende ligning, udtrykte den følgende ukendte variabel og substitueret i andre ligninger og så videre. Eller brugte tilsætningsmetoden, det vil sige to eller flere ligninger foldet for at udelukke nogle ukendte variabler. Vi vil ikke stoppe i detaljer om disse metoder, da de i det væsentlige er modifikationer af Gauss-metoden.
De vigtigste metoder til løsning af elementære systemer af lineære ligninger er CRAMER-metoden, matrixmetoden og Gauss-metoden. Vi vil analysere dem.
Opløsning af systemer af lineære ligninger ved cramer-metoden.
Lad os løse et system med lineære algebraiske ligninger 
Hvor antallet af ligninger er lig med antallet af ukendte variabler, og det afgørende for systemets hovedmatrix er forskelligt fra nul, det vil sige.
Lad - determinant for systemets hovedmatrix, og ![]() - determinanter af matricer, der opnås ved en erstatning 1., 2., ..., n-wow Kolonne, henholdsvis på kolonnen af \u200b\u200bfrie medlemmer:
- determinanter af matricer, der opnås ved en erstatning 1., 2., ..., n-wow Kolonne, henholdsvis på kolonnen af \u200b\u200bfrie medlemmer: 
Med en sådan notation beregnes ukendte variabler ved hjælp af formlerne af CRAMER-metoden som  . Så der er en løsning på systemet med lineære algebraiske ligninger ved CRAMER-metoden.
. Så der er en løsning på systemet med lineære algebraiske ligninger ved CRAMER-metoden.
Eksempel.
CRAMER METODE  .
.
Afgørelse.
Systemets hovedmatrix har formularen  . Vi beregner dens determinant (hvis det er nødvendigt, se artiklen):
. Vi beregner dens determinant (hvis det er nødvendigt, se artiklen): 
Da determinanten af \u200b\u200bsystemets hovedmatrix er forskellig fra nul, har systemet en enkelt opløsning, der kan findes ved Cramer-metoden.
Vi vil komponere og beregne de nødvendige determinanter ![]() (Vi opnår determinanten, udskiftning i matrixen og den første kolonne på kolonnen af \u200b\u200bfrie medlemmer, determinant - erstatter den anden kolonne på kolonnen af \u200b\u200bfrie medlemmer, - erstatter den tredje kolonne i matrixen og på kolonnen af \u200b\u200bfrie medlemmer ):
(Vi opnår determinanten, udskiftning i matrixen og den første kolonne på kolonnen af \u200b\u200bfrie medlemmer, determinant - erstatter den anden kolonne på kolonnen af \u200b\u200bfrie medlemmer, - erstatter den tredje kolonne i matrixen og på kolonnen af \u200b\u200bfrie medlemmer ): 
Vi finder ukendte variabler af formler  :
:
Svar:
Den største ulempe ved CRAMER-metoden (hvis den kan kaldes en ulempe) er kompleksiteten af \u200b\u200bat beregne determinanterne, når antallet af systemligninger er mere end tre.
Løsning af systemer af lineære algebraiske ligninger ved matrixmetoden (ved hjælp af en omvendt matrix).
Lad systemet med lineære algebraiske ligninger specificeres i matrixform, hvor matrixen A har dimensionen n på N, og dens determinant er forskellig fra nul.
Siden, så er matrixen A reversibel, det vil sige, der er en omvendt matrix. Hvis du multiplicerer begge dele af lighed til venstre, får vi formlen for at finde en kolonne-kolonne af ukendte variabler. Så vi opnåede en opløsning af et system med lineære algebraiske ligninger ved matrixmetoden.
Eksempel.
Bestem systemet med lineære ligninger matrix metode.
Afgørelse.
Jeg omskriver systemet med ligninger i matrixformularen: 
Som
At hældningen kan løses ved matrixmetoden. Ved hjælp af omvendt matrix kan løsningen af \u200b\u200bdette system findes som  .
.
Vi konstruerer en invers matrix ved hjælp af en matrix fra algebraiske tilsætninger af elementerne i matrix A (om nødvendigt se artiklen): 
Det er fortsat at beregne - matrixen af \u200b\u200bukendte variabler, multiplicere returmatrixen  På matrix-kolonnen af \u200b\u200bfrie medlemmer (se artiklen om nødvendigt):
På matrix-kolonnen af \u200b\u200bfrie medlemmer (se artiklen om nødvendigt): 
Svar:
 Eller i en anden record x 1 \u003d 4, x 2 \u003d 0, x 3 \u003d -1.
Eller i en anden record x 1 \u003d 4, x 2 \u003d 0, x 3 \u003d -1.
Hovedproblemet Ved løsning af opløsninger af lineære algebraiske ligninger består matrixmetoden i kompleksiteten af \u200b\u200bden inverse matrix, især for firkantede matricer af ordren over den tredje.
Løsning af systemer af lineære ligninger af Gauss-metoden.
Lad os nødt til at finde en løsning af et system fra n lineære ligninger med n ukendte variabler 
Determinant af hovedmatrixen er forskellig fra nul.
Essensen af \u200b\u200bGauss-metoden Den består i den sekventielle udelukkelse af ukendte variabler: Først udelukker x 1 af alle systemets ligninger, startende fra det andet, derefter x 2 i alle ligninger, der starter fra tredje og så videre, indtil kun den ukendte variabel XN forbliver i den sidste ligning. En sådan proces med omdannelse af systemligninger til konsekvent udelukkelse af ukendte variabler kaldes direkte drift af Gauss-metoden. Efter fjernelse af den direkte bevægelse af Gauss-metoden fra den sidste ligning er X n, ved hjælp af denne værdi fra den næstsidste ligning, beregnes X N-1, og det beregnes således, at X1 beregnes ud fra den første ligning. Processen med beregning af ukendte variabler ved kørsel fra systemets sidste ligning til den første kaldes tilbagevenden af \u200b\u200bGauss-metoden.
Beskriv kort en algoritme for at udelukke ukendte variabler.
Vi vil antage, at da vi altid kan opnå denne permutation af systemlignerne. Bortset fra en ukendt variabel x 1 af alle ligninger af systemet, startende fra det andet. For at gøre dette vil den anden ligning af systemet tilføje den første multipliceret med til den tredje ligning, tilsæt den første, multipliceret med og så videre til n-th-ligningen for at tilsætte den første multipliceret ved. Systemet af ligninger efter sådanne transformationer vil tage formularen 
hvor en.  .
.
Vi ville være kommet til det samme resultat, hvis X1 ville udtrykt X 1 gennem andre ukendte variabler i systemets første ligning og det resulterende ekspression substitueret i alle andre ligninger. Således er variablen X1 udelukket fra alle ligninger, der starter fra det andet.
Dernæst virker vi ligeledes, men kun med en del af det opnåede system, som er markeret i figuren 
For at gøre dette tilføjer vi det andet, multipliceret med den fjerde ligning til den fjerde ligning, den anden, multipliceret med og så videre til n-th-ligningen, tilsæt det andet, multipliceret med. Systemet af ligninger efter sådanne transformationer vil tage formularen 
hvor en.  . Således er variablen X 2 udelukket fra alle ligninger, der starter fra den tredje.
. Således er variablen X 2 udelukket fra alle ligninger, der starter fra den tredje.
Dernæst fortsæt til udelukkelsen af \u200b\u200ben ukendt x 3, mens de fungerer på samme måde som den del af systemet, der er markeret i figuren 
Så vi fortsætter den direkte bevægelse af Gauss-metoden, mens systemet ikke tager 
Fra det øjeblik begynder vi omvendt kursus af Gauss-metoden: Beregn XN fra den sidste ligning, da vi bruger den resulterende Xn, finder vi X N-1 fra den næstsidste ligning, og så videre finder vi x 1 fra den første ligning.
Eksempel.
Bestem systemet med lineære ligninger Gauss metode.
Afgørelse.
Lad os udelukke en ukendt variabel x 1 fra den anden og tredje systemligning. For at gøre dette tilføjer vi de tilsvarende dele af den første ligning til begge dele af den anden og tredje ligning, multipliceret med henholdsvis: 
Nu, fra den tredje ligning udelukkes X 2, og tilsættes til venstre og højre dele de venstre og højre dele af den anden ligning multipliceret med: 
På dette er den direkte bevægelse af Gauss-metoden færdig, vi begynder det modsatte.
Fra den sidste ligning af det opnåede system af ligninger finder vi x 3: 
Fra den anden ligning får vi.
Fra den første ligning finder vi den resterende ukendte variabel, og disse gennemfører den omvendte bevægelse af Gauss-metoden.
Svar:
X 1 \u003d 4, x 2 \u003d 0, x 3 \u003d -1.
Løsning af lineære algebraiske ligninger af generel form.
I det generelle tilfælde falder antallet af systemet P-ligninger ikke sammen med antallet af ukendte variabler n:
En sådan hældning må ikke have løsninger, har en enkelt beslutning eller har uendeligt mange løsninger. Denne erklæring henviser også til systemernes systemer, hvis hovedmatrix er firkantet og degenereret.
Theorem of the Kronkera - Capelli.
Før du finder en løsning af et system med lineære ligninger, er det nødvendigt at fastslå dets kompatibilitet. Svaret på spørgsmålet, når slavet er sammen, og når den er ufuldstændig, giver koncheker Teorem - Capelli:
For at systemet fra P-ligninger med n ukendt (P kan være lig med n), er det nødvendigt, og nok, at rangen af \u200b\u200bsystemets hovedmatrix var lig med rangen af \u200b\u200ben udvidet matrix, det vil sige rang ( A) \u003d rang (t).
Overvej eksemplet brugen af \u200b\u200bsættet af KRANKEKER - CAPELELLI for at bestemme samlingen af \u200b\u200bsystemet med lineære ligninger.
Eksempel.
Find ud af, om systemet med lineære ligninger har  løsninger.
løsninger.
Afgørelse.
 . Vi bruger metoden til travlt mindre. Mindre af anden rækkefølge
. Vi bruger metoden til travlt mindre. Mindre af anden rækkefølge  Forskellig fra nul. Vi vil overvinde de tredje ordens mindreårige fra forkant:
Forskellig fra nul. Vi vil overvinde de tredje ordens mindreårige fra forkant: 
Da alle tredje ordens grundlæggende mindreårige er nul, er rangen af \u200b\u200bhovedmatrixen to.
Til gengæld er rangen af \u200b\u200ben udvidet matrix  svarende til tre, som mindre af den tredje rækkefølge
svarende til tre, som mindre af den tredje rækkefølge 
Forskellig fra nul.
På denne måde, Rang (a) derfor på Krakecker-sætningen - Capelli kan det konkluderes, at det oprindelige system af lineære ligninger er ufuldstændigt.
Svar:
Systemet af løsninger har ingen.
Så vi lærte at etablere en ufuldstændighed af systemet ved hjælp af KLEKEKER - CAPELLI sætning.
Men hvordan man finder en løsning på slavien, hvis dens kompatibilitet er installeret?
For at gøre dette har vi brug for begrebet base mindre af matrixen og sætningen på matrixens ring.
Mindre af den højeste rækkefølge af matrixen A, forskellig fra nul, kaldes basis.
Fra definitionen af \u200b\u200bden grundlæggende mindreårsager følger det, at dens ordre er lig med matrixmarginen. For en nonzero matrix, men der kan være flere grundlæggende minororer, er en grundlæggende mindre mindre.
For eksempel overveje matrixen  .
.
Alle mindreårige i den tredje rækkefølge af denne matrix er nul, da elementerne i den tredje linje af denne matrix er summen af \u200b\u200bde tilsvarende elementer i første og anden linje.
De grundlæggende er følgende mindreårige i den anden rækkefølge, da de er forskellige fra nul 
Minora.  De grundlæggende er ikke, da de er nul.
De grundlæggende er ikke, da de er nul.
Sætningen på matrixens rang.
Hvis ringen af \u200b\u200bordren P pr. N er lig med R, er alle elementerne i strengene (og søjlerne) af matrixen, som ikke danner den valgte base-mindre, lineært udtrykkeligt gennem de tilsvarende elementer af strenge (og søjler) danner basen mindre.
Hvad giver os sætning på matrixens rang?
Hvis vi på sætningen af \u200b\u200bKreconenker - Capelli sætter enhederne i systemet, vælger vi enhver grundlæggende mindre af hovedmatrixen af \u200b\u200bsystemet (dets ordre er lig med R) og udelukker fra systemet alle ligninger, der ikke gør det danner den valgte base mindre. Den således opnåede hældning svarer til originalen, da de kasserede ligninger stadig er unødvendige (de er den lineære kombination af de resterende ligninger i retning af matrixens rangtæt).
Som følge heraf er der efter at have afskediget overskydende ligninger af systemet mulige.
Hvis antallet af R-ligninger i det resulterende system er lig med antallet af ukendte variabler, vil det være en bestemt, og den eneste løsning kan findes ved Cramer-metoden, matrixmetoden eller Gauss-metoden.
Eksempel.
 .
.
Afgørelse.
Rank hovedsystem matrix  lig med to, som den anden ordre mindre
lig med to, som den anden ordre mindre  Forskellig fra nul. Rangen af \u200b\u200ben udvidet matrix
Forskellig fra nul. Rangen af \u200b\u200ben udvidet matrix  Også lig med to, da den eneste mindreeste af den tredje rækkefølge er nul
Også lig med to, da den eneste mindreeste af den tredje rækkefølge er nul 
Og den første ordre mindre diskuterede ovenfor er forskellig fra nul. Baseret på sættet af KroCecker - Capelli er det muligt at godkende delingen af \u200b\u200bdet oprindelige system af lineære ligninger, da rang (A) \u003d rang (t) \u003d 2.
Som en grundlæggende mindre, tage . Det danner koefficienterne for første og anden ligning: 
Den tredje ligning af systemet er ikke involveret i dannelsen af \u200b\u200ben base mindre, derfor udelukker vi det fra systemet baseret på sætningen på ringmatrixen: 
Så vi fik et elementært system af lineære algebraiske ligninger. Ved at løse det ved hjælp af krateret: 
Svar:
x 1 \u003d 1, x 2 \u003d 2.
Hvis antallet af R-ligninger i den resulterende hældning er mindre end antallet af ukendte variabler n, så i de venstre dele af ligningerne, forlader vi de komponenter, der danner basisorien, resten af \u200b\u200bkomponenterne overføres til de rigtige dele af systemligningerne med det modsatte tegn.
Ukendte variabler (deres r-stykker), der forbliver i de venstre dele af ligningerne, kaldes grundlæggende.
Ukendte variabler (deres N - R stykker), som var i de rigtige dele, kaldes ledig.
Nu mener vi, at gratis ukendte variabler kan gøre vilkårlige værdier, mens R-grundlæggende ukendte variabler vil blive udtrykt gennem gratis ukendte variabler på den eneste måde. Deres udtryk kan findes at løse den resulterende prøve ved drivmåden, matrixmetoden eller metoden til gauss.
Vi analyserer på eksemplet.
Eksempel.
Bestem systemet med lineære algebraiske ligninger  .
.
Afgørelse.
Vi finder rangen af \u200b\u200bsystemets hovedmatrix  Metoden til travle mindreårige. Som en nonzero mindre af den første ordre, tag en 1 1 \u003d 1. Lad os starte søgningen efter en anden-order ikke-nul mindre, hvilket skærer denne mindreårige:
Metoden til travle mindreårige. Som en nonzero mindre af den første ordre, tag en 1 1 \u003d 1. Lad os starte søgningen efter en anden-order ikke-nul mindre, hvilket skærer denne mindreårige: 
Så vi fandt nonsens mindre af den anden rækkefølge. Lad os starte søgningen efter nonzero, der grænser op til den tredje rækkefølge: 
Således er rangen af \u200b\u200bhovedmatrixen tre. Rangen af \u200b\u200ben udvidet matrix er også lig med tre, det vil sige systemet koordineres.
Den grundsatte nonzero-mindre af den tredje rækkefølge vil tage som en grundlæggende.
For klarhed viser vi de elementer, der danner basen Minor: 
Vi forlader komponenterne i systemet i den venstre del af de ligninger, der er involveret i basisminalen, resten overføres med modsatte tegn til de rigtige dele: 
Giv de frie ukendte variabler x 2 og x 5 vilkårlige værdier, det vil sige, vi vil tage ![]() hvor - vilkårlige tal. På samme tid vil hældningen tage
hvor - vilkårlige tal. På samme tid vil hældningen tage 
Det resulterende elementære system af lineære algebraiske ligninger ved at løse styresystemet: 
Dermed ,.
Som svar, glem ikke at angive gratis ukendte variabler.
Svar:
Hvor - vilkårlige tal.
Sammenfatte.
For at løse et system med lineære algebraiske ligninger af en fælles type finder vi først sin kompatibilitet ved hjælp af Konpekerens sætning - Capelli. Hvis rangen af \u200b\u200bhovedmatrixen ikke er lig med rangen af \u200b\u200ben udvidet matrix, konkluderer vi systemets ufuldstændighed.
Hvis rangen af \u200b\u200bhovedmatrixen er lig med rangen af \u200b\u200ben udvidet matrix, vælger vi base mindre og kasserer ligningen af \u200b\u200bsystemet, der ikke deltager i dannelsen af \u200b\u200bden valgte base mindre.
Hvis rækkefølgen af \u200b\u200bbasisminalen er lig med antallet af ukendte variabler, har Slava en enkelt løsning, som vi finder en metode, der er kendt for os.
Hvis størrelsen af \u200b\u200bbasisminalen er mindre end antallet af ukendte variabler, så i den venstre del af systemligningerne forlader vi komponenterne med de vigtigste ukendte variabler, de resterende komponenter overføres til de rigtige dele og giver gratis ukendte variabler vilkårlig værdier. Fra det resulterende system med lineære ligninger finder vi de vigtigste ukendte variabler af producenten, matrixmetoden eller metoden til Gauss.
Gauss metode til løsning af systemer af lineære algebraiske ligninger af generel form.
Gauss-metoden kan løse systemet med lineære algebraiske ligninger af nogen art uden forud for deres forskning på enheder. Processen med konsekvent udelukkelse af ukendte variabler giver os mulighed for at konkludere både af slavens kompatibilitet og ufuldstændighed, og i tilfælde af, at løsningen af \u200b\u200bløsningen gør det muligt at finde det.
Fra det synspunkt af beregningsoperation foretrækkes Gauss-metoden.
Se hans detaljerede beskrivelse og demonterede eksempler i Gauss-metoden til at løse systemer af lineære algebraiske ligninger af generel form.
Optag generel løsning af homogene og inhomogene systemer af lineær algebraisk ved anvendelse af vektorerne i det grundlæggende opløsningssystem.
I dette afsnit vil vi diskutere de fælles homogene og inhomogene systemer af lineære algebraiske ligninger, der har uendelige indstillede opløsninger.
Vi vil først forstå med homogene systemer.
Grundlæggende systemløsninger Det homogene system fra P lineære algebraiske ligninger med N ukendte variabler kaldes et sæt (N - R) lineært uafhængige opløsninger af dette system, hvor R er rækkefølgen af \u200b\u200bbasisminalen af \u200b\u200bsystemets hovedmatrix.
Hvis du udpeger lineært uafhængige løsninger af en homogen hældning som x (1), x (2), ..., x (NR) (x (1), x (2), ..., x (NR) - disse er matricerne af dimensionskolonnerne n ved 1), den generelle opløsning af dette homogene system præsenteres i form af en lineær kombination af vektorer af det grundlæggende system af opløsninger med vilkårlig konstant koefficienter med 1, C2, ..., C (NR), det vil sige.
Hvad betegner udtrykket generel løsning af et homogent system af lineære algebraiske ligninger (OROSTAL)?
Betydningen er enkel: Formlen sætter alle mulige løsninger til den oprindelige slaves, med andre ord, der tager et sæt værdier af vilkårlig konstants C1, C2, ..., C (NR), ifølge formlen, Vi får en af \u200b\u200bløsningerne i den første homogene hældning.
Således, hvis vi finder et grundlæggende system af løsninger, vil vi være i stand til at bede alle løsninger på denne homogene hældning som.
Lad os vise processen med at opbygge et grundlæggende løsningssystem med en homogen hældning.
Vi vælger den grundlæggende mindre af det oprindelige system af lineære ligninger, vi udelukker alle andre ligninger fra systemet og overføres til de rigtige dele af systemlignerne med modsatte tegn, alle vilkår, der indeholder gratis ukendte variabler. Lad os give en gratis ukendt variabel værdi på 1,0,0, ..., 0 og beregne det vigtigste ukendte, løse det resulterende elementære system af lineære ligninger på nogen måde, for eksempel ved drivemetoden. SO X (1) vil blive opnået - den første løsning af det grundlæggende system. Hvis du giver en gratis ukendt værdi på 0,1.0,0, ..., 0 og beregne den vigtigste ukendte, så får vi x (2). Etc. Hvis de frie ukendte variabler giver værdien 0,0, ..., 0,1 og beregne den vigtigste ukendte, så får vi x (n-r). Dette vil blive bygget et grundlæggende system med løsninger på en homogen hældning, og dens generelle løsning kan registreres.
Til inhomogene systemer af lineære algebraiske ligninger er en generel opløsning repræsenteret i form, hvor er den generelle opløsning af det tilsvarende homogene system og den private løsning af den oprindelige inhomogene hældning, som vi får, hvilket giver en fri ukendt værdi på 0,0, ..., 0 og beregning af værdierne for de vigtigste ukendte.
Vi analyserer på eksemplerne.
Eksempel.
Find et grundlæggende løsningssystem og en generel løsning af et homogent system med lineære algebraiske ligninger.  .
.
Afgørelse.
Rangen af \u200b\u200bhovedmatrixen af \u200b\u200bhomogene systemer af lineære ligninger er altid lig med rangen af \u200b\u200ben udvidet matrix. Vi finder rangen af \u200b\u200bhovedmatrixen ved metoden til travle mindreårige. Som en nonzero mindre af den første ordre, tag elementet en 1 1 \u003d 9 af systemets hovedmatrix. Vi vil finde den, der grænser op til den nonzero mindre af den anden rækkefølge: 
Mindre af anden rækkefølge, forskellig fra nul, fundet. Vi vil overvinde de tredje ordre mindre fødevarer på jagt efter ikke-nul: 
Alle tredje ordens fokuseringsminer er nul, derfor er rangen af \u200b\u200bden primære og udvidede matrix to. Vi tager de grundlæggende mindre. Vi bemærker for klarhed de elementer i systemet, der danner det: 
Den tredje ligning af den oprindelige hældning deltager ikke i dannelsen af \u200b\u200bden grundlæggende mindreårige, derfor kan den udelukkes: 
Vi forlader justeringerne, der indeholder de vigtigste ukendte i de rigtige dele af ligningerne, og vi bærer vilkårene med gratis ukendte i de rigtige dele:
Vi konstruerer et grundlæggende system med løsninger af det oprindelige homogene system af lineære ligninger. Det grundlæggende system af løsninger på denne hældning består af to løsninger, da den oprindelige hældning indeholder fire ukendte variabler, og rækkefølgen af \u200b\u200bdens grundlæggende minora er to. For at finde X (1), lad os give en gratis ukendt variabel værdi x 2 \u003d 1, x 4 \u003d 0, så hovedet ukendt at finde fra systemet af ligninger  .
.